
Draganfly

Feedback Twin Rotor System (copy 1)
Manualer Getting Started - Installation - Software
Reference Manual - External Interface - Advanced Teaching
The Twin Rotor MIMO (multiple input, multiple output) system provides a high-order, non-linear system with significant cross-coupling. Both PID and State Feedback controllers are installed as embedded controllers in the real-time kernel software.
Curriculum Coverage
- Real time digital control
- Model identification & tuning for 1degree of freedom (DOF), either vertical or horizontal
- Non-linear model & state space representation
- 1DOF & 2DOF PID control for stabilisation or tracking
- Feedback linearisation
- Linear quadratic control
- Mouse control animation
- On-line parameter change

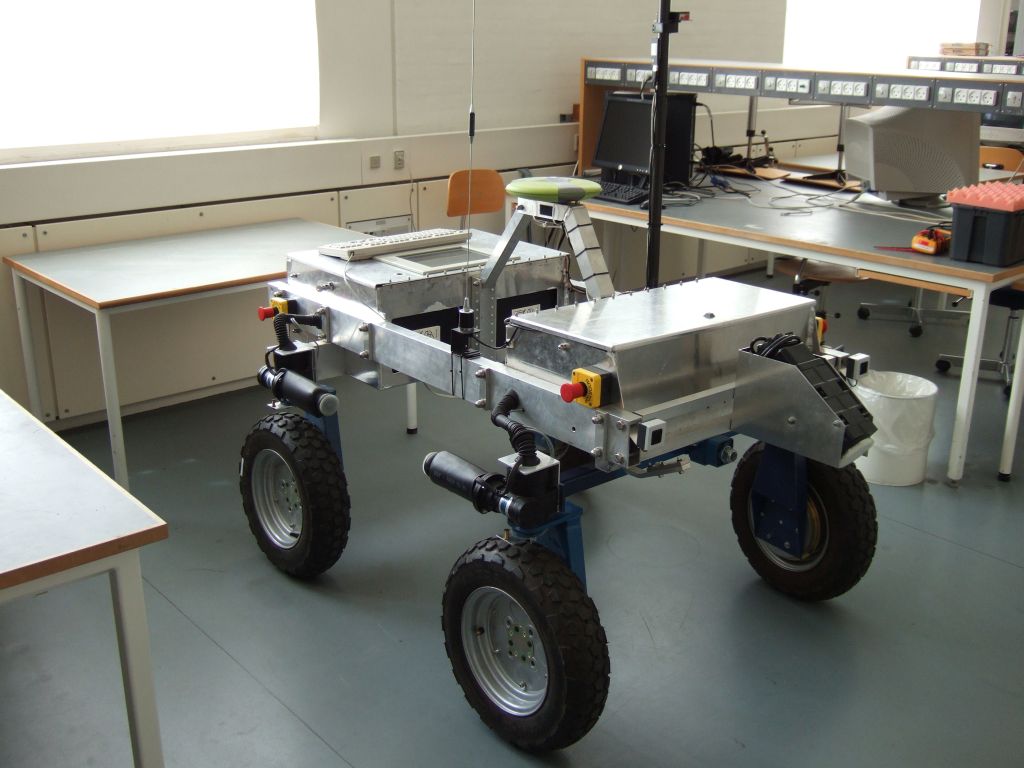
Festo Robotino
Mobile robot with a round stainless steel chassis and three omnidirectional drive units.
Chassis with:
- Rubber guard strip with integrated collision protection sensor
- 9 infrared distance sensors
- Analogue inductive sensor
- 2 optical sensors
- Colour webcam with USB interface
- Diameter 370 mm
- Height incl. housing: 210 mm
- Overall weight: approx. 11 kg

Hvac Ventilation
Hvac Ventilation

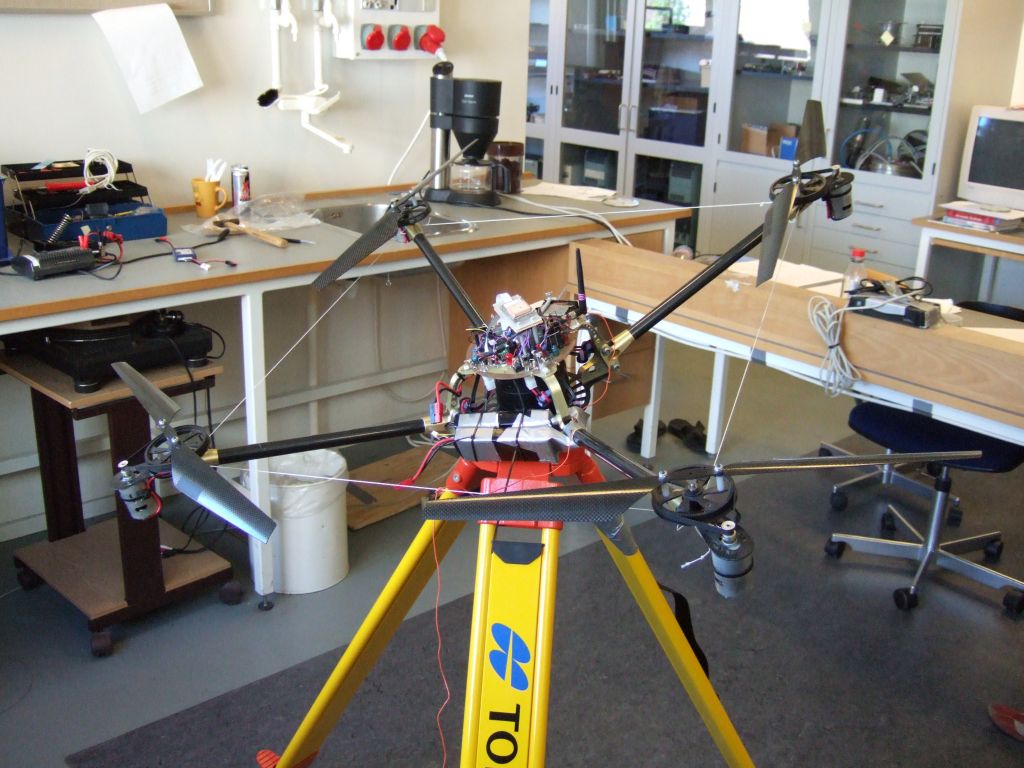
Helicopter

Koelelab Danfoss

Portal Kran

{kind=link}
{kind=link}
Truck
The purpose of this student project is to make a truck with two semi-trailers go backwards